On our main KML file (JACOB-DATA.kml) we have the following data sets. As we add more we will note them here. If you do not see all of these in the Google Earth display, then update the KML file listed above. If you have not tried this yet, just download this file and drag it to Google Earth.
Clouds
This is essentially the full GOES West image. This updates every 6h or so. It is the file we call P3 in our Satellite Image Briefing.
Ocean Currents
RTOFS is an ocean model. This model is run every day and extends out 5 days.
OSCAR is a more direct measure of ocean currents but is a sliding 10 day average updated every 5 days. See starpath.com/currents. We will be updating these two current sources manually every few days, most likely with another post and video as this is part of the trip we are most interested in.
BOM winds
This is a graphic image of model forecasts from Bureau of Meteorology in AU. It is most likely the GFS model, but we have not tested that yet. This updates automatically. These winds are updated every 6 hr. The region shown is what the BOM calls the South West Pacific. We can compare this forecast with the actual winds we see in the ASCAT satellite data. There are other BOM products over this region we can look at later on. We have here analysis, 24h, 48h, 72h, and 96h.
Jacob Refresh
This is his hourly position report, which updates every hour. The 18th hour is marked in red so we can note the 24-hr runs. These should update automatically. The positions we show are a sliding average of the past 3 positions shown on the official jacobadoram.com web site's tracking page.
ASCAT
These are the scatterometer wind measurements. The satellite circles the earth every 101 minutes, up one side (ascending) and down the other side (descending). Unfortunately, there is a broad nadir gap of missing data just below the path of the satellite, so on some passes we do not see new data. To determine the valid time, look at the small purple number at the bottom of the pass, and compare it to the data set time at the top of the page. If the pass time is less than the dataset time, then pass date is same as the dataset date, else it is the day before.
Pilot Chart Countercurrent boundaries
This is now old data as he is past this current band. These are discussed in our countercurrent article.
HI-Cairns track
This is the rhumb line route from Hi to Cairns. It servers as a general reference line on the passage. It is safest to stay east of that line at all times. We will add other course markers and progress guidelines later on.
400-nmi Range Rings Centered on Cairns
These can be turned on and off. They are a way to mark progress. Also truth meters, in that any track parallel to one of these lines is not getting any closer to Cairns.
HFO Wind and Waves
These are the Hawaii Forecast Office wind and waves products, which include the 00z and 12 analysis of actual conditions, along with 24h, 48h and 72h forecasts.
NWS surface forecast maps
These show isobars and fronts for 24h, 48h, and 72h. Ideally, these remain boring, with mostly open white space.
Wave Heights, directions, and Periods
This is data from BOM. It is for the combined seas. You can look at periods above 8 or 9 seconds as likely to be swells, and lower periods to be wind waves.
Climatic wind data from GOGOW
This is the best source of climatic global winds for sailors.
Clouds
This is essentially the full GOES West image. This updates every 6h or so. It is the file we call P3 in our Satellite Image Briefing.
Ocean Currents
RTOFS is an ocean model. This model is run every day and extends out 5 days.
OSCAR is a more direct measure of ocean currents but is a sliding 10 day average updated every 5 days. See starpath.com/currents. We will be updating these two current sources manually every few days, most likely with another post and video as this is part of the trip we are most interested in.
BOM winds
This is a graphic image of model forecasts from Bureau of Meteorology in AU. It is most likely the GFS model, but we have not tested that yet. This updates automatically. These winds are updated every 6 hr. The region shown is what the BOM calls the South West Pacific. We can compare this forecast with the actual winds we see in the ASCAT satellite data. There are other BOM products over this region we can look at later on. We have here analysis, 24h, 48h, 72h, and 96h.
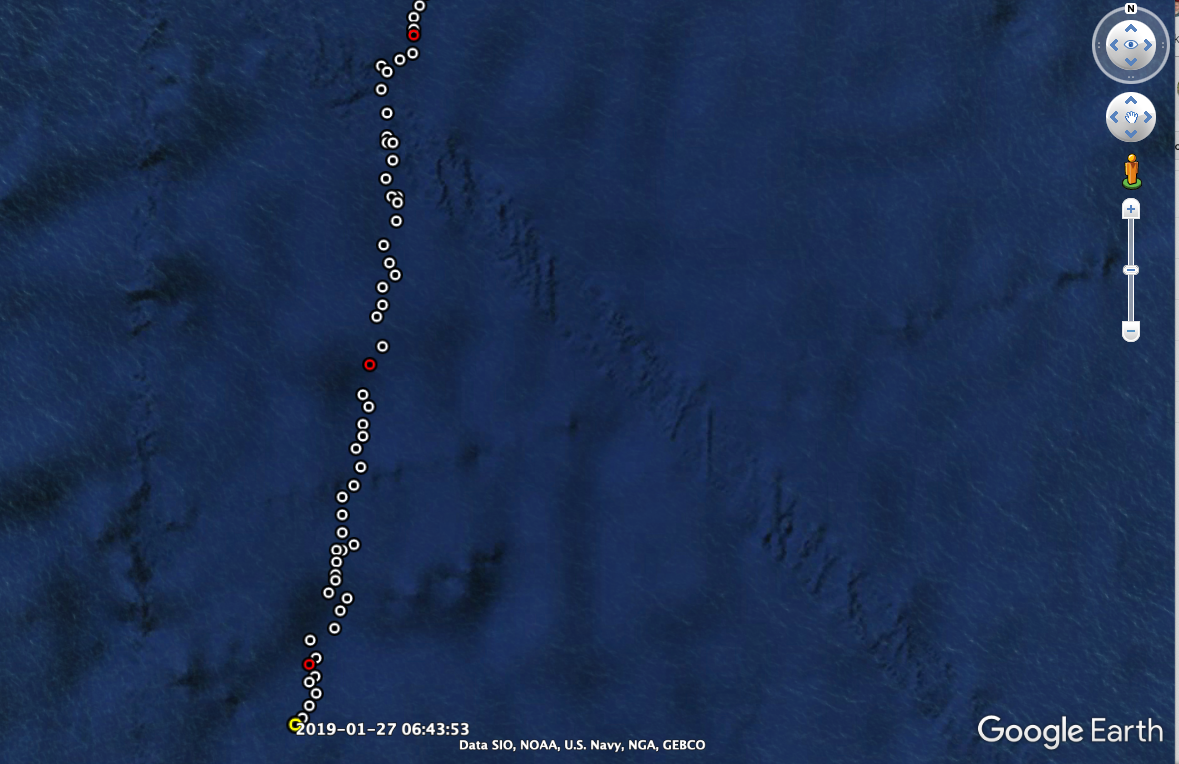
Jacob Refresh
This is his hourly position report, which updates every hour. The 18th hour is marked in red so we can note the 24-hr runs. These should update automatically. The positions we show are a sliding average of the past 3 positions shown on the official jacobadoram.com web site's tracking page.
ASCAT
These are the scatterometer wind measurements. The satellite circles the earth every 101 minutes, up one side (ascending) and down the other side (descending). Unfortunately, there is a broad nadir gap of missing data just below the path of the satellite, so on some passes we do not see new data. To determine the valid time, look at the small purple number at the bottom of the pass, and compare it to the data set time at the top of the page. If the pass time is less than the dataset time, then pass date is same as the dataset date, else it is the day before.
Pilot Chart Countercurrent boundaries
This is now old data as he is past this current band. These are discussed in our countercurrent article.
HI-Cairns track
This is the rhumb line route from Hi to Cairns. It servers as a general reference line on the passage. It is safest to stay east of that line at all times. We will add other course markers and progress guidelines later on.
400-nmi Range Rings Centered on Cairns
These can be turned on and off. They are a way to mark progress. Also truth meters, in that any track parallel to one of these lines is not getting any closer to Cairns.
HFO Wind and Waves
These are the Hawaii Forecast Office wind and waves products, which include the 00z and 12 analysis of actual conditions, along with 24h, 48h and 72h forecasts.
NWS surface forecast maps
These show isobars and fronts for 24h, 48h, and 72h. Ideally, these remain boring, with mostly open white space.
Wave Heights, directions, and Periods
This is data from BOM. It is for the combined seas. You can look at periods above 8 or 9 seconds as likely to be swells, and lower periods to be wind waves.
Climatic wind data from GOGOW
This is the best source of climatic global winds for sailors.